
We are excited to announced the result of the results of Phase 1 of OpenCV Spatial AI competition sponsored by Intel.
What an incredible start!
Overwhelming response : 235 submissions
As stated on the contest announcement page, the goal was to select the 15 best submissions and give them a prototype OAK-D plus 30 days access to Intel® DevCloud for the Edge and support on a community slack channel.
When we started, we expected around 50 entrants.
Instead we got 235!
This presented a quite the amount of work for the judges, especially Brandon who graciously took on the job of first responder to all 235 entrants.
It was a LOT of work, but it was such a pleasure looking at great pitches by people who are excited about your product. Thank you all who put in the hard work.
Purchase OpenCV AI Kits
Black Friday Sale
Phase 1 Results : 32 winners + 23 other strong entries
Of those 235, we selected the 54 strongest entries and debated them down as far as we could… to 31. These pitches were so good we had to double our number of winners chosen.
Out of 235, we’ve chosen 32 winners by the strength of the pitch deck, the potential for capital-G Good, the team capability, and yes there were some points for the coolness of the ideas too.
Phase 1 winners will also receive a GoPro-compatible mount for their OAK-D in addition to the smart camera itself. This greatly expands the potential for positioning, wearing, or affixing the OAK-D module.
A good deal for 54 strong entries
In fact, we were so overwhelmed by the quality of submissions we don’t want to let them go entirely.
So, here is our two part deal for you.
Part 1
The 23 strong entries will get a chance to buy the current version of OAK-D at an incredible price of just $129 + shipping. So you can work on the projects you had submitted in the proposal.



Part 2
As you may know, we are running a Kickstarter campaign for OAK. At the time of writing this post, we had crossed $450k in funding! As a result of this incredible success, new hardware features will be added to OAK-D. For example, we have already promised to add an IMU (orientation sensor)
If your team is among the top 53 entries AND you accomplish the project you pitched in the proposal, or build something else really cool that we can use to promote OAK, we’ll also send them a free production model OAK-D. You’ll also potentially be promoted by us in the press and marketing materials.
Without further ado, here are the Winners of Phase 1 of the OpenCV Spatial AI Competition Sponsored By Intel, listed with the names of the team members involved. Congratulations to all who were selected and best of luck in Phase 2!
List of 32 Winners
- Airline Cargo Capacity Optimization
- Abhijeet Bhatikar, Daphne Tsatsoulis, Nils Heyman-Dewitte, Hasan Syed
- Solving the empty space due to airlines only being able to sell 85%-90% capacity of airplane cargo due to the inability to accurately measure the size of items being shipped.
- Artificial 3D Perception for the Blind
- Marx Melencio
- A chest-strapped mobile 3D perception device developed and created by a completely blind assistive tech user. Check out the demo of their current solution
- A Seamless Navigation Device for Visually Challenged People
- Jegathesan Shanmugam, Afrid Thenebanda, Aditya Bhattacharya
- Detecting and classifying the spatial objects around a person as well as the environment is the goal of this visual aid.
- At Home Work-out Assistance Device
- Daniel Rodriguez Perazzo, Gustavo Camargo Rocha Lima, Natalia Souza Soares, Victory Gouveia De Menezes Lyra
- This project aims to help folks working out at home with posture and pose correction technology.
- Automated Monitoring of Cow Body Condition Score
- Christopher Obando, Fernando Recalde, Marcelo Ortiz, Dario Mendoza
- A system for Automatic Monitoring of BCS in cows using a spacial depth camera with artificial intelligence.
- Automatic Lawn Mower Navigation
- Jan Lukas Augustin and Silas Raschka
- An RGB-D law mowing bot utilizes the object detection, positional tracking, and semantic segmentation features of OAK-D
- Automatic Pest Control Using Depth and Targeted Pesticide
- Nandakishor M
- Classifying and targeting pests directly can greatly reduce the overall amount of pesticide used, passively benefiting other insect populations.
- Automatic Point-of-Sale Recognition of Food Items
- Justin Shenk & VisioLab
- A low-footprint solution for food recognition for easy integration of point-of-sale systems.
- Automating Visual Inspection Tasks with Computer Vision
- Rodolph Vogt, David Tavares, Danijel Zarkovic, Aram Kalanyan
- A wearable project that takes a depth map and recognizes pedestrian crossing signals, cars, and other obstacles to aid navigation for the visually impaired.
- Autonomous Humanoid Robot for Basic Interaction
- Marek, Klaudiusz, Szymon Majkowski
- A humanoid robot built using OpenCV for object and shape recognition, object classification, object tracking, speech recognition.
- Autonomous UV disinfecting robot using OpenCV AI Kit OAK-D
- Oscar Santiago Noreña Hemelberg & Jose Manuel Noreña Hemelberg
- Differential locomotion robot to sanitize surfaces using ultraviolet light and OAK-D’s perception capabilities.
- Autonomous Wildlife Protection System
- Orion Robotics, Murat Kaya, Barkın Balci, Yunus Emre Yeniyurt, Mehmet Efe Çakir
- A wandering robot system for monitoring natural areas including wildfire detection and monitoring wildlife, using OAK-D’s capabilities for pathfinding and object detection.
- Cyclops – A Spatial AI and NLP based Assistant for Visually Impaired People
- Kaustubh Sadekar, Malav Bateriwala, Vishruth Kumar
- The system will be assembled in a device similar to a VR headset and allow the wearer to ask if any objects matching speech input are found nearby and provides active feedback when approaching found objects.
- Detection and reporting of poachers in the contiguous forests between Burkina Faso and Ghana
- Appau Ernest Kofi Mensah
- This project hopes to become an Artificial Intelligent Edge based smart camera for real-time detection, geolocating and reporting of poachers to help protect endangered wildlife.
- Device To Assist in The Location And Grabbing Of An Object
- Pierre Mangeot
- This project will support voice recognition of items and guide the wearer to them using specially trained neural networks and depth information.
- Fall Detection & Pose Estimation Of Bedridden Patients
- T. Alves, J. Amaral, G. Igrejas, P. Rodrigues
- Tracking pose estimation of bedridden patients and detecting patient falls using OAK-D is the goal of this medical project.
- Fish Monitoring and Measurement System
- Petr Císař, Jan Urban, Ievgen Koliada, Oleksandr Movchan
- This automated sampling system lets farmers monitor fish welfare and growth rates in high-intensity cultivation systems such as RAS continuously in real-time.
- Fork Lift Safety System
- Kunal Tyagi, Kota Mogami, Abhishek Sharma, Bhuvanchandra DV
- Real Time Perception for Autonomous Forklifts is the goal of this warehouse robotics project.
- Group-Aware Social Distancing Monitor
- Salik Nadeem
- Depth-aware detection of social-distancing protocol violation through view-invariant human-action recognition.
- Intelligent Seeding
- Peter Wang, Wayne Zhang
- Adding the benefits of instant analysis and long-term monitoring capabilities to agricultural seeing.
- Mask-Aware Access Control System
- Elisardo González Agulla, José Luis Alba Castro, Manuel Ubeira Rego
- Access Control System that includes face mask detection and social distance measurement.
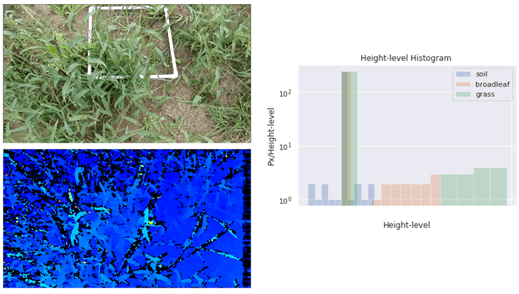
- Mechanical Weeding For Better Organic Farming
- Lehar Kewalramani, Bjarne Moro, Robin Lehmann, Martijn Lukaart
- A project taking advantage of semantic segmentation, combining AI and robotics to enable more efficient agricultural outputs.
- OpenCV AI kit to pick glass bottles with a robot arm
- Sergio Redondo, Juan Pedro Ruiz, Arturo Piñeiro, Alejandro Olivo
- Like says on the tin, eh?
- Occlusion Robust Face Pose Generation and Tracking
- Ashwin Srinivas
- Improving facial detection systems for robot-assisted human activities such as robot-assisted feeding, robot haircuts, robot makeup and so on.
- Project Deepway
- Satinder Singh
- Truly independent navigation for visually impaired humans, with physical guidance servos and pathfinding. Check out the 2 minute video
- Smart Navigator for Visually Impaired Person (VIP)
- Suraj Shankar Sapkal, Bryan Inacio Rathos, James Barabas
- Using sensor fusion to collision warnings and environmental awareness, as well as providing audio image captioning of detected text.
- Social Distancing Feedback For Visually Impaired People
- Ibai Gorordo
- A wearable system that provides feedback to the user about the distance to other people around in order to keep the social distancing.
- Traffic Monitoring for Smart Cities
- Israel Pineda, Rafael Alejandro Valencia Ramos, Luis Zhinin, Giovanny Eduardo Caluña Chicaiza
- This city improvement project intends to provide detection of traffic jams, rush hours, non-vehicles in the road, and vehicle distribution.
- Using Spatial AI to detect indoor Landmarks and enabling Graph-Based Pose-Landmark SLAM
- Deepak Talwar, Sachin Guruswamy, Seung Won Lee
- This novel solution to indoor simultaneous localization and mapping problems adds Landmarks to the mix, creating a more robust SLAM system.
- Vision based Rainfall Intensity Sensing using OAK-D
- Gineesh Sukumaran, Meinte Vierstra , Abhishek Saha, Yixin Jiang
- Augmenting rainfall intensity estimation with OAK-D to enhance real-time operations such as flood management.
- Visually Impaired Ambulation Device
- Jagadish Mahendran
- A project to build a reliable smart perception system to assist blind and visually impaired people to safely ambulate in a variety of indoor and outdoor environments.
- Visually Impaired Navigation Assistance
- Pranav Shekhar, Aparna Sakshi, Rashmi
- This project’s goal is to aid the navigation of blind people using OpenVino and OAK-D Toolkit to classify objects, people, obstacles and road signs.
List of 22 other strong entries
- Weed Monitoring
- Paula Ramos Giraldo, Edgar Lobaton, Søren Skovsen, Chengsong Hu
- Visually-Impaired Assistance Glasses
- Joel Juan Pablo Gramajo Chan
- Visually-Impaired AI Navigation Haptic System
- Oliver Sadorra, Tim Streett, Daniel Scarr, Hunter Suchyj
- Visually Impaired Sensory Substitution System
- Marcelo Raponi, Alejandro Mitaritonna
- Visually Impaired Obstacle Detection and Avoidance
- Yuantao Feng, Ziqiong Li, Zihao Mu
- Visually Impaired Obstacle Detection
- Eduard Reñé Claramunt
- Visually Impaired Object Finding
- Noé Achache, Xavier, Adrien
- Visually Impaired Navigation Device
- Francesco Polzella, Gianmarco Spinatelli, Guido Garozzo, Giacomo Corridori
- Visually Impaired Hazard Awareness System
- Scott Thibault
- Visually Impaired Haptic Feedback Device
- Akanxit Upadhyay, Bhomik Luthra
- Visually Impaired Assistance Watch-and-Tell
- Jakub Segen, Marek Kulbacki, Artur Bak, Marcin Klimczewski
- Visual Assistance Glasses
- Jatin Chawla, Nisarg Bhatt
- Visual Assistance Audio Feedback Device
- Adam Słucki, Dominik Samorek, Pawel Luniak, Tomasz Mikolajczyk
- Surgery Room Tool and Personnel Tracking
- Nithin Shivashankar, Prithvi Prakash, Ayushi Shukla, Sukhbir Singh Yadav, Warsha Barde, VishnuSai Yoganand, Raghu Menon, Shanthanu Chakravarthy
- Sign Language Detection
- Kaibalya Prasad Bhuyan, Smruti Sikha Panigrahi, Kamaljeet Sahoo, Raj Aryaman Patra
- Safe Driving Quantifier and Metric System for Fleets
- Ganesh Prabhakaran, Kapil Saini, Keshav Aggarwal, Gautam Sareen
- Pre-Harvest Fruit Grade Distribution
- B Sruteesh Kumar, B Mrudhukar, A Srinivas, Nikhil
- Operator Guidance System – Computer Vision Guided Quality Assurance/Control
- Bart Moyaers, Stijn De Bruyckere, Bart Lamberigts, Kim Rutten
- Manual Production Monitoring for Process Improvement
- Jie Huo, Mohammad Anvaripour, Khizer Hayat
- Dynamic Advertisements in Retail/Mall Navigation Display
- Domenico D. Bloisi, Andrea Pennisi
- Bird detection and cataloging system
- Maurice Havelday
- Automatic Drone-Based Tree-height Census Device
- Wanderlei Preisler
A note to all participants
We are extremely thankful for your submission.
If you did not win, do not lose heart. Life (and OpenCV) will provide you with other opportunities to prove your skills via competitions.
You may be chosen next time!
A (potential) competition for vision impairment solutions
Of the 31 winners, 11 are concerned primarily with Vision Impairment solutions covering everything from object identification to voice recognition and assisted human pathfinding. There were so many excellent projects submitted for assisting the visually impaired specifically that we are currently investigating a future competition based just on that topic. We are actively seeking sponsors, so if that might be you please contact us.
Phase 2: Deadline extension
We will be shipping the OAK-D to the 31 winners in about 3 days.
Originally, Phase 2 was slated for a 1-month period (July 20 to Aug 20), but due to the feedback of entrants and the sheer number of high-quality of submissions, we have decided to increase this timeline in order to give teams plenty of time to achieve their goals. We will update this section with the exact details in a couple of days. Stay tuned for information on that.
We’ll be following up soon with information about ALL of these great projects, and we hope you’re as excited to see their progress as we are. Thank you, everyone, who submitted a project and thank you, backers!
Many thanks to Intel
At the heart of every OAK is an Intel® Myriad X™ VPU generating 4 Trillion Operations per Second making neural inference possible. We are thankful to Intel for its technology leadership in edge AI and for sponsoring this competition.

5K+ Learners
Join Free VLM Bootcamp3 Hours of Learning