

Our guest for last week’s edition of OpenCV Weekly Webinar was Gerard Espona of Team Kauda (featured in our first post). You can find that episode on YouTube, along with the rest of the episodes past and future. This week we had a tutorial on how to create your own panoramas with OpenCV. Sign up to attend the next webinars at 9am every Thursday on Zoom, free: https://us02web.zoom.us/j/83231402214
In this post we’re featuring a short question and answer session with some of the teams posting cool stuff online as part of OpenCV AI Competition 2021 using the #OAK2021 hashtag. Thanks to Teams BenchBotics and UCB_Squirrels for talking with us this time! If you missed the previous editions of this series featuring teams and cool videos from the Competition, go back and read Part 1 and Part 2!
Some Highlights From The #OAK2021 Hashtag

- Team Kauda’s weekly update, showing virtual OAK devices in Unity, with pipeline support
- Team EyeCan showed off their TrinocularStereoNet being used to label fruit
- Team SHL Robotics’ Self-Driving Ads Robot ventures outside
- Team Roc4t.tech demonstrates their cow face detector
- An OAK-D’s stereo cameras being streamed live over the internet using the Open Source Self Driving Car VisionAI platform
- Team Cortic reveals their new distributed MQTT communication system for edge computing devices
- The quadruped Agri Bot takes its first steps with OAK-D
Want your team or video to be featured here? Post content with the #OAK2021 hashtag! We’ll definitely see it and so will thousands of competition watchers all over the world.
Team BenchBotics

What is your project?
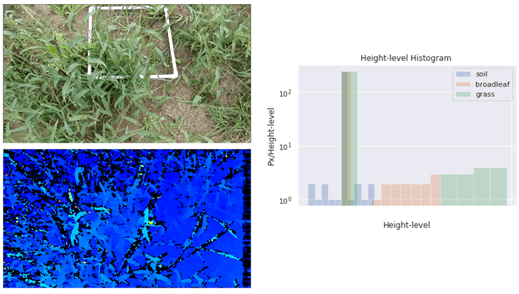
BenchBot is a plant phenotyping platform, which consists of two major components: a semi-automatic image acquisition device and a central process unit to control the platform and camera movement. BenchBot is low-cost, modular, upgradeable, portable, and easy to use. Specifically, BenchBot can be adjusted to work in benches of different dimensions and the camera height can be changed to accommodate plants of different heights and sizes. We are currently examining image acquisition and processing approaches that work best under greenhouse conditions (i.e. high levels of light and heat) (Figure 3). Furthermore, we are developing image-processing algorithms needed to detect and identify plants, detect leaves, determine leaf area and estimate overall plant biomass.
Our first prototype consisted of a frame that can be moved along greenhouse benches with a mounted camera system (camera and lights) that stops at each potted plant to take individual RGB and depth images. We are currently developing a semi-autonomous system, which requires minimal human intervention. Expected products include a stable control application and a suitable database that enables biomass measurements and plant detection algorithms. We are also working on full automation of the platform and image acquisition. We anticipate broad adoption of this technology among public and private plant breeders.
Does your team have a funny “origin story?” How did you get together?
It’s too hot!
While our team has been focused on high throughput phenotyping systems for years, this specific approach was motivated because of the unbearably hot conditions that occur in greenhouses in the peak of the summer. We felt there had to be a better way! In 2019, we explored breeding cover crops for shade tolerance to fit within corn and soybean production systems. This effort began with a greenhouses screening of germplast at the USDA Agricultural Research Service site in Beltsville, Maryland. We had 73 genotypes, 3 treatments, and 4 reps (~876 plants!). In order to evaluate the performance of the genotypes under different shade conditions, we used classic phenotyping techniques such as measuring the width and height of each plant. We also took pictures of the plants using a PVC frame and a standard compact camera with the intent of using those to evaluate the performance of the plants as well. This process was repeated every week for 10 weeks. Measuring and taking pictures for almost 9000 plants, we needed 2 people, more than 120 hours inside of the greenhouse during the summer with more than 100 F, super-hot. Unless you like the sauna, this is not an ideal place to stay for a long time during the summer.
How did you decide what problem to solve?
The need for an automating image acquisition that could reduce operators’ time in the greenhouse as well as standardize data acquisition systems using high throughput phenotyping birthed BenchBot. in Using simple RGB and depth images combined with a semiautonomous platform at low cost could revolutionize the breeding of new germplasm. Over time, we have created improvements to BenchBot and expanded its applications to include various camera systems that correlate to a diverse array of phenotyping targets in crops.
What is the most exciting part of #OAK2021 to you?
One of the biggest challenges that we face in the development of this platform is the management of data flow and analysis in real-time. The OAK-D camera could be a game-changer to our project, since we could compress information that is transmitted to the cloud for further analyses, thus allowing for efficient real-time data flow and analysis. We are very excited to create a low-cost, semi-automated, non-invasive method for identifying plant species and quantifying their biomass, density, and leaf area under greenhouse conditions using the new OpenCV AI Kit (OAK-D) and the Intel Distribution of OpenVINO Toolkit. The successful execution of this project will greatly increase access to high-throughput phenotyping solutions for breeders, thus accelerating crop improvements globally.
What do you think/feel upon learning you were selected for Phase 2?
We are thrilled to be considered for the next phase of this competition. OpenCV is pioneering the way computer vision and learning is applied in the technology sector and such a competition stands to make a positive impact in numerous sectors and trends in image processing technology and applications of computer vision. It is an honor and exciting to participate in this competition and help innovate around the applications of computer vision and machine learning.
What, if anything, has surprised you so far about the competition?
What has been so inspiring for us is the way our team has come together and expanded synergies into other workflows. The competition really lit a fire under our partnerships and had greatly accelerated our progress and innovations around the development of BenchBot.
We somewhat expected this dynamic as we had the same experience in the last competition. The response time of the support team is very short and extensive.. It’s great to enter a competition where you will have the support you need to keep going. We are very grateful and impressed with the support and efforts by Luxonis.





Do you have any words for your fellow competitors?
Moving forward as a community is paramount. It is the best way to grow the technology, by supporting and encouraging each other. We are part of a privileged group of developers, innovators, and users of technology and together we can expand the value and use of real-world solutions to all.
Where should readers follow you, to best keep up with your progress?
The best way to follow our progress is:
- Website: https://precisionsustainableag.org/
- YouTube channel: Precision Sustainable Agriculture – YouTube,
- LinkedIn: https://www.linkedin.com/in/paula-ramos-41097319/
Team UCB_Squirrels

What is your project? Briefly describe your problem statement and proposed solution
Traditional identification systems are limited due to the growth of security problems, large amount of information to be monitored, and the recent demand for wearing face masks – which makes face recognition unsuitable. To overcome this issue, we propose to identify people by only using their way of walking since gait traits can be acquired without significant difficulties and from large distances – all considering real-time responses. This technology is considered as the most appropriate biometric for surveillance systems and can be used to identify people for applications like access control and reidentification, among others.
Does your team have a funny “origin story?” How did you get together?
Most of us have been working on Computer Vision and Machine Learning for a while at UCB. But the starting point for our team in this Competition can be traced to one Facebook post that included the key terms: deadline extended. We had few days to build our proposal and understand the OAK-D, difficult but not impossible. Fortunately, we had been working on the field for some years, so it was not a problem to gather our ideas and write a proposal on time. The opposite happened with our team’s name. Despite having a time working together, thinking of a name was a really new task that no one expected.
How did you decide what problem to solve?
Due to the COVID-19 pandemic across the globe, Governments have taken measures such as the compulsory wearing of face masks public places and social distancing. These new policies posed a challenge for traditional identification systems that used the face or fingerprint as biometric trait. Consequently, identification systems based on new biometrics, such as gait, became even more attractive. Furthermore, our main motivation relies on human identification to avoid illegal human trafficking, which is a latent problem in developing countries like ours.
What is the most exciting part of #OAK2021 to you?
We would say that the most exciting thing about this competition is being able to be part of something that is happening right now and may have profound implications on how Computer Vision is being implemented in real-world conditions. Additionally, taking part of a selected group that can have a hands-on experience with a state-of-the-art device is inspiring us to keep researching and developing.
What do you think / feel upon learning you were selected for Phase 2?
At first, we got excited to know that the problem that we were trying to solve was considered of high importance by people with years of experience in the CV field. But then, we also came to realize that being selected for this phase meant that we were going to be able to work OAK-D devices and earn first-hand experience on state-of-the-art devices. This blew our minds and got us enthusiastic about what was coming ahead.
What, if anything, has surprised you so far about the competition?
Two things have surprised us: the flexibility/capabilities of the OAK-D, and the support that is constantly provided. There is a wide variety of projects that can be done with this device, and watching the diversity of ideas that the competitors have is enriching and insightful for us. Furthermore, we were also surprised with the OAK-D capabilities, because being able to process artificial intelligence tasks inside the device is convenient and a very desired property. Finally, we weren’t expecting the amount of support through the OpenCV dedicated course and the discord server.
Do you have any words for your fellow competitors?
Keep up with the great work, we’ve seen some of your projects and are awesome. We’re amazed of the vast diversity of projects that could be made by using the same device.
Where should readers follow you, to best keep up with your progress?
- Notion: https://www.notion.so/OpenCV-contest-cc5ff809f674471a83b4f4c28f19c9f8
- GitHub: https://github.com/cidimec/UCB-squirrels
- YouTube Channel (UCB Ingeniería Mecatrónica):https://www.youtube.com/channel/UC_7gXEA-2D8rLPws_BEC3rg
- Website: https://cidimec.github.io/UCB-squirrels/
More To Come
Thanks for reading this third post in our series of team profiles. These are just a few of the over 200 teams participating in this huge competition- we wish them all the very best of luck! If you’re an AI creator who wants to join in on the cool stuff, why not buy yourself an OAK-D from The OpenCV Store?
Stay tuned for more profiles, and follow the #OAK2021 tag on Twitter, LinkedIn, or Instagram for a steady stream of awesome stuff from these amazing teams. Don’t forget to sign up for the OpenCV Newsletter to be notified when new posts go live, and get exclusive discounts and offers from our partners.


5K+ Learners
Join Free VLM Bootcamp3 Hours of Learning