
Since the OpenCV AI Competition 2021 began in earnest, we’ve seen hundreds of posts from teams building amazing projects all over the world. It can be intimidating to keep up with this much cool stuff, but we’re doing our best. Roboflow CEO Joseph Nelson covered some of the emerging trends in a post last month. If you missed the first edition of this series featuring teams and cool videos from the competition, go back and read Part 1!
In other news OpenCV Weekly Webinar guest this week was Ye Lu from Team Cortic Tigers (featured in our previous post). Another #OAK2021 participant, Gerard Espona of Team Kauda, will join us next week, May 13th! The title of Gerard’s presentation is “Creating Digital Twins with OpenCV AI Kit and Unity.” Sign up to attend on Zoom, free: https://us02web.zoom.us/j/83231402214
In this post we’re featuring some of the teams posting cool stuff online using the #OAK2021 hashtag, featuring a short Q&A with each. Thanks to Teams Essort, Roc4t.tech, and SHL Robotics for talking with us!

Some Highlights From The #OAK2021 Hashtag
- Charlie the Lego robot learns to be a photographer
- Face detection, eye tracking, and segmentation all running on OAK-D
- Team Kauda’s robotic arm assembly and weekly recap video showing head pose estimation in Unity
- Ritesh Kanjee’s gesture-controlled drone using OAK-1
- eyecan.ai’s Python package, oakeye featuring Trinocular Camera Calibration (Code)
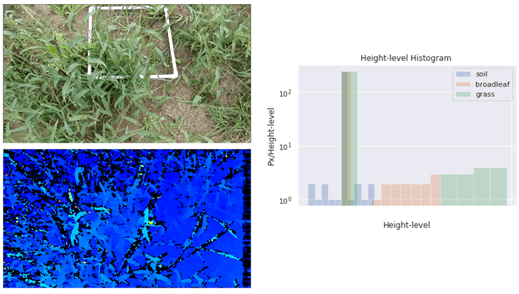
- A first video look at The BenchBotics’ project: Identifying weed species and estimating their biomass with OAK-D
- OAK goes outdoors and tracks cows in a pasture
Want your team or video to be featured here? Post content with the #OAK2021 hashtag! We’ll definitely see it and so will thousands of competition watchers all over the world.
Team Profile: Roc4t.tech

What is your project?
The problem we are addressing is to support the diagnosis of Bovine Respiratory Disease (BRD) through an intelligent camera-based approach.
It’s the most common and costly disease which effects Beef cattle in the world.
BRD is a complex, bacterial infection that causes pneumonia in calves which can be fatal. The infection is usually a sum of three co-dependent factors: stress, an underlying viral infection, and a new bacterial infection. The diagnosis of the disease is complex since there are multiple possible causes.
The proposed solution is about using Computer Vision for early detection of disease in cattle.
And to try to solve this problem, we provide various monitoring activities for example:
- Cow detection and tracking
- Cow Face Recognition
- Accurate temperature measurement using external Thermographic sensors
- Abnormal Behaviour Recognition
- Building models from collected data
Does your team have any funny “origin story?” How did you get together?
The team @Roc4t.tech is composed of experienced and passionate Computer Vision Engineers from different parts of the world: South America, Europe and Asia.
I had the chance to collaborate with them in the past on other Computer Vision related projects and I was extremely glad when they decided to participate in the OpenCV AI challenge with me.
One funny thing is maybe the name of the team: Roc4T because it’s related to a famous French Cheese (Roquefort) made in my area using Sheep milk but not Cow milk.
How did you decide what problem to solve?
It is an application that I had in mind for a long time. I had the opportunity to grow up on a farm in the south of France, so I was quite aware of the impact that this disease can cause in livestock in terms of mortality.
A few days before I applied for the OpenCV AI Competition, there was an epidemic in my family’s cattle, and some calves died due to non-early detection. This situation was like an evidence for me to try to find solutions and to avoid this in a non-intrusive way that may guarantee the good life of the animals. As mentioned in the challenge submission document, I think it is important to solve real problems that affect our environment.
What is the most exciting part of #OAK2021 to you?
The competition represents a great opportunity to develop cutting-edge solutions in a little-known area for the welfare of animals. In our context, this proposal can benefit the processes of veterinarians and farm owners. For the team, it is a great pleasure to have the support at the software and hardware level.
Thanks to social networks, I had the chance to talk with some veterinarians, and I discovered some new possibilities for our technology such as improving the vaccination process for Bovine Ephemeral Fever, which is a disease that various cattle breeders are fighting in some tropical and subtropical regions of Asia and Africa.
What do you think / feel upon learning you were selected for Phase 2?
Before learning the results, we lived a few days of suspense. As the dates were reported, each night (or morning for the other team members) we waited together for the answer. There were a few days when we were very impatient knowing about the results. Ultimately, we will have the OAK kit to do the implementation of the proposal ;-)… so we go with strength to the next stage.
What, if anything, has surprised you so far about the competition?
I was really surprised to see some spontaneous initiatives from followers on social network providing us some help to increase our image database with different races of cow, you can enjoy the pictures here: https://www.linkedin.com/posts/arnaudbastide_oak2021-computervision-opencv-activity-6776901498971451392-1Jfc
In addition, @Picsellia, a French company specialized in dataset management and model training offer us access to their platform in order to accelerate the training process, you can read the story here: https://www.linkedin.com/posts/arnaudbastide_oak2021-computervision-opencv-activity-6780925072656916480-4zcy
Do you have any words for your fellow competitors?
I really encourage them to promote their achievement on social networks so everybody can see the amazing work they are doing #OAK2021.
Our team have some connections with some others finalists’ teams, and we are now very curious to meet them in the real life during a workshop in the future!
Where should readers follow you, to best keep up with your progress? (Twitter, LinkedIn, etc)
Please follow roc4t.tech page on LinkedIn: https://www.linkedin.com/company/rocfortech



You can reach the members of the Team Roc4T:
- Arnaud : https://www.linkedin.com/in/arnaudbastide/
- Jorge : https://www.linkedin.com/in/jorgeluisperezmedina/
- Hùng : https://www.linkedin.com/in/vi%E1%BB%87t-h%C3%B9ng-nguy%E1%BB%85n-b942632a/
- Davy : https://www.linkedin.com/in/davy-b-3aa2b0121/
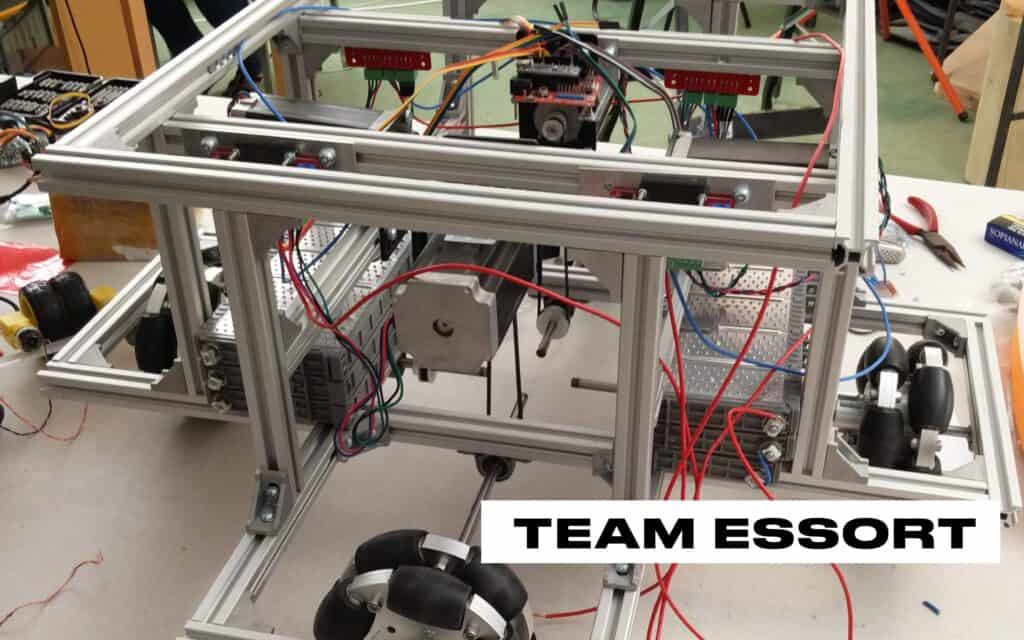
Team Profile: Essort
What is your project? Briefly describe your problem statement and proposed solution
We are building the second version of our Stereoscopic VR Telepresence Research Platform. With this experiment we can put the remote controller person virtually into the robot. Seeing what is in front of you is imperative, being able to look around adds the missing link to the Telepresence experience. From the feedback we got over the years the most requested feature is Third Person View, which is commonplace in modern video games but unheard of in the field of robotics.
The secondary problem we would like to solve is the safety concern of the robot around crowds. The obstacle detection is complicated because the robot movement is omni directional. When users remote control the platform, currently they see first person view and they are not aware if there are other people or objects around them.
With four OAK-D devices we are able to provide full 360 visual coverage of Obelisk supplemented by depth perception. Stereoscopic Point Of View will be complemented with Over The Shoulder Third Person View for a truly next generation telepresence experience. Offloading the majority of visual algorithms to OAK-D helps us levitate cost and complexity.
The Obelisk 2 robot main feature is VR remote control, but it is capable of some autonomous functions. With the pose estimation, waving can be recognized thus the robot can automatically turn towards them and start interacting with them.
Does your team have a funny “origin story?” How did you get together?
We are fascinated by robotics, and thought provoking sci-fi shows. In 2008 we liked to do some projects with robots, and we found about one of the biggest and most challenging robotics competition in Hungary called “Hungarians on Mars” (MaM https://www.magyarokamarson.hu) After the first competition we clearly know for sure that we wanted to experiments with robotics, and this became our main hobby. We believe that with the available tools, the implementation of the solutions seen in sci-fi films is getting closer and closer. Over the years, we met many like-minded people, some of whom also joined the team.We are passionate not just about our research, and competitions, but teaching and giving back to our local community as well. In 2018 we co-founded the Hungarian Robot Builders Association ( https://hungarianrobot.hu/ ) the largest robot building community in Hungary to date. With the Association we are fortunate to present Obelisk – our research platform – to several thousand people.
How did you decide what problem to solve?
At first we thought about some complex survey, inspection system, but when we talked about it in the team, we thought we would rather write about our flagship project, the Obelisk 2 because we like to work on it, and we have big plans with it in the future. We have gained a lot of experience with it in previous years, and lots of feedback at the exhibitions. We started to build the Obelisk 2 chassis some years ago therefore, its development would not start from scratch.When we discovered the features of the OAK-D it became clear that this would make development much easier, and faster. We would have used intel real sense cameras and nvidia jetson board in the original plans.
So we thought why not to try, maybe the Obelisk 2 project is interesting enough to get into the finals.
What is the most exciting part of #OAK2021 to you?
The most exciting thing for us is that we can use state-of-the-art hardware on the robot, with especially good support and help. And not only 1, but 4 at the same time. We want to solve a task in the competition that we are definitely capable of, but in the long run we will certainly try a lot of other things with it. Another exciting thing for us is that we haven’t participated in many international competitions so far. Perhaps we have never taken social media appearances and documentation as seriously as we do now.
What do you think / feel upon learning you were selected for Phase 2?
We were very surprised, because there are so many projects. At first in a hurry we looked for the submission, to check what we sent in 😀 When we learnt about the number of the projects we thought we wouldn’t get in. We are very happy to have the opportunity and we try to share all kinds of interesting things about our project.
We have been moving on with plans every week since then and trying to keep up with documentation.
What, if anything, has surprised you so far about the competition?
The webinar and the discord community is one of the biggest surprises. They provide a lot of useful information. The git repos and examples worked right away. Really easy to get into the examples and try to modify and experiment with it.
Do you have any words for your fellow competitors?
Just the motto of our team: to infinity and beyond!
Where should readers follow you, to best keep up with your progress? (Twitter, LinkedIn, etc)
We post updates on:
- https://twitter.com/Essort
- https://www.instagram.com/essort/
- https://www.facebook.com/Essort
- Currently this is the most detailed description of the project https://hackaday.io/essort
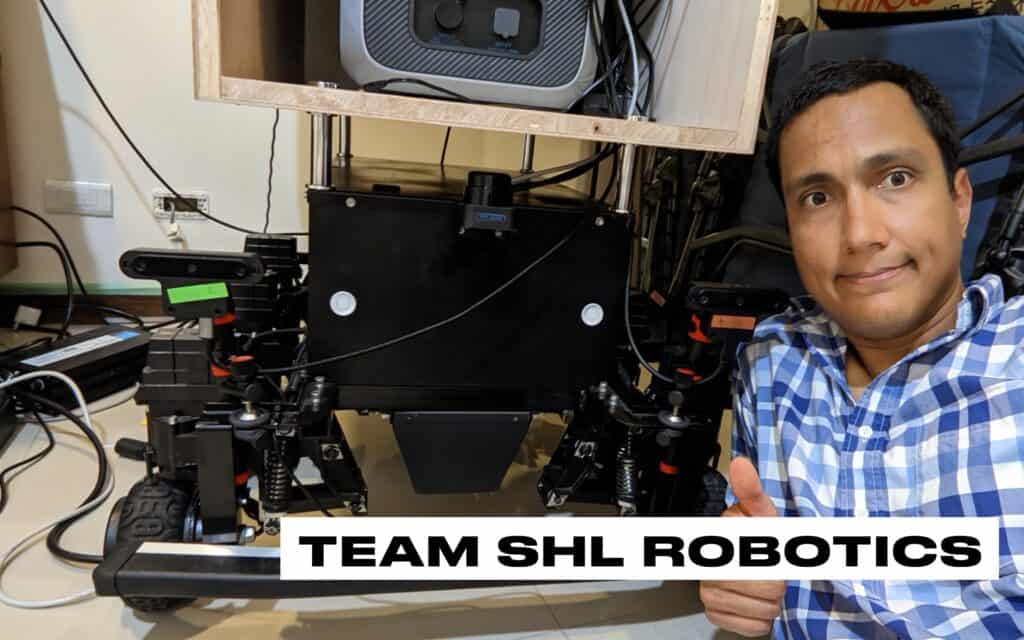
Team Profile: SHL Robotics
What is your project? Briefly describe your problem statement and proposed solution
Before finding out about the OAK-D campaign on Kickstarter, I was working on the first phase of my Self-Driving Ads Robot (SEDRAD). SEDRAD is an autonomous mobile base that will carry two 49” outdoor displays and will be showing ads in public spaces like parks. Before Oak-D, the two main issues I had to solve were, how to use sensors to navigate and avoid obstacles and how to efficiently do face analysis to gather analytics related to viewers of the ads. I was so excited when I found out about Oak-D last summer since this mighty camera can help me with the beforementioned issues. Essentially, I am working on using two front-facing Oak-D cameras to do semantic segmentation to detect drivable surfaces that SEDRAD can navigate. At the same time the robot needs to avoid small obstacles using depth data from the cameras. Two side cameras mounted above the 49” inch displays will do person tracking, face detection, and help with age/gender/emotion recognition to gather the analytics data to be offered to advertisers.
Does your team have a funny “origin story?” How did you get together?
My team is a solo team, so there is no funny story about how we got together. The only funny thing is the face of my friends when they see my project and when they learn that I have been working on it all alone.
How did you decide what problem to solve?
During my lunch break, after eating my meal, I would always take a walk around the block to help with my digestion. I quickly realized how common it is for stores in the country I live to have these movable billboards on wheels outside of their store. I could not help but think what a waste was to have those wheels but that the billboard was still stuck in one place. The amount of people able to see the billboard would be a lot bigger if the billboard could be always moving around the nearby areas. That’s how I decided to work on this problem.
What is the most exciting part of #OAK2021 to you?
I have always enjoyed joining competitions but most of them have been small, short, or local. This is the first time that I am competing in a large, long, international competition. It is super exciting to know that hundreds of brains are working hard using amazing hardware to solve interesting problems. I have to also admit that it feels great to see that my project seems to be in the same league with some of the other amazing stuff other teams are posting about on their social media. Finally, the more I play with the Oak-D, the more I feel this is a game-changing piece of hardware and I am super happy to be part of the early-adopters.
What do you think / feel upon learning you were selected for Phase 2?
I was nervous and anxious, especially after learning that the announcement of phase 1 winners was postponed. During that extra waiting time, I grew more excited because I understood how great it would be if I was selected considering the difficulty the organizers showed in picking winners from all the great submissions. When I saw my team’s name in the final list, it felt great, it was rewarding, and also reassuring as I could feel I was working on something cool, and making it to phase 2 just validated my intuitions.
What, if anything, has surprised you so far about the competition?
First, it surprised me to see how this competition grew from a few competitors in the first iteration to the large number of entries in the second iteration. Something also very surprising is how responsive the Luxonis and OpenCV teams are when I have had questions related to the competition or technical issues.
Do you have any words for your fellow competitors?
OpenCV has always been a great tool surrounded by a great community, Luxonis has brought amazing hardware to the game. We should all consider ourselves lucky to be part of the community and this competition. Let’s do our best and show the world what amazing stuff can be achieved through human ingenuity.
Where should readers follow you, to best keep up with your progress? (Twitter, LinkedIn, etc)
The best way to follow my progress is:
- Twitter: https://twitter.com/kidargueta
- LinkedIn: https://www.linkedin.com/in/carlos-argueta/
- Instagram: https://www.instagram.com/kidargueta/
- Website: https://soulhackerslabs.com/
More To Come
Thanks for reading this second post in our series of team profiles. These are just a few of the over 200 teams participating in this huge competition- we wish them all the very best of luck! If you’re an AI creator who wants to join in on the cool stuff, why not buy yourself an OAK-D from The OpenCV Store?
Stay tuned for more profiles, and follow the #OAK2021 tag on Twitter, LinkedIn, or Instagram for a steady stream of awesome stuff from these amazing teams. Don’t forget to sign up for the OpenCV Newsletter to be notified when new posts go live, and get exclusive discounts and offers from our partners.


5K+ Learners
Join Free VLM Bootcamp3 Hours of Learning