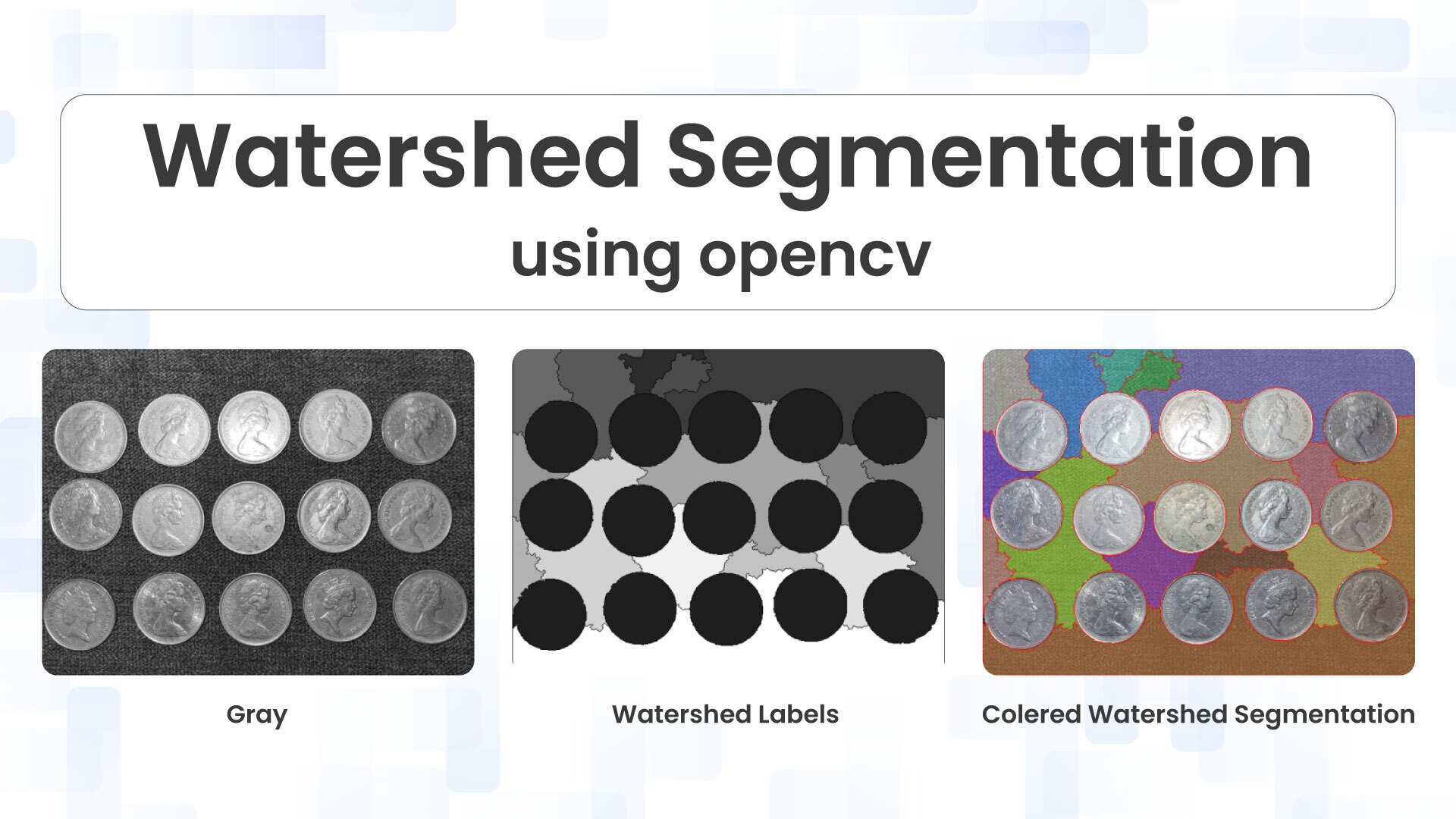
Explore the elegant intersection of nature-inspired algorithms and computer vision. This comprehensive technical guide unveils the powerful watershed segmentation technique, demonstrating how a simple topographic analogy translates into sophisticated image
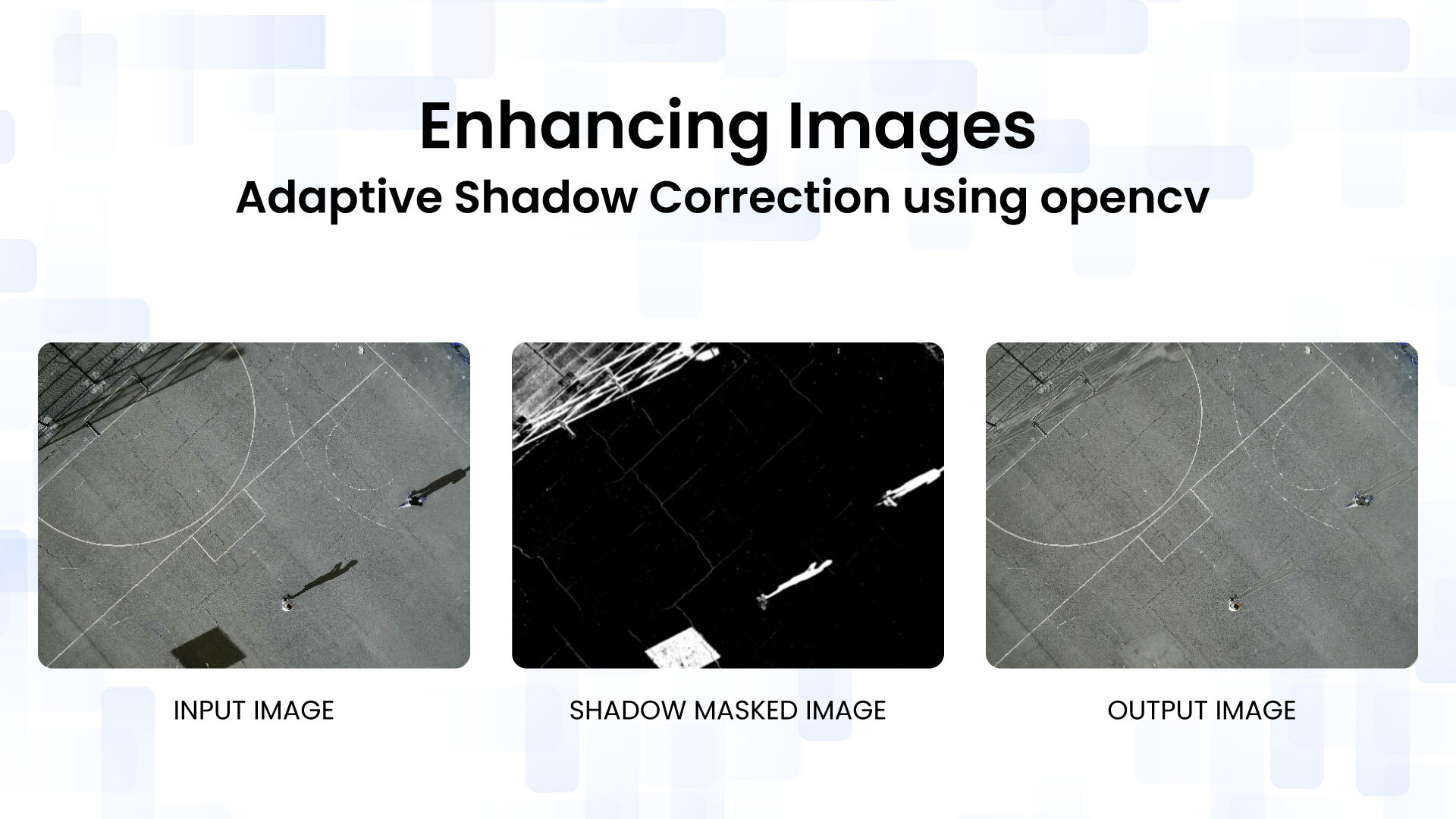
In this blog post, we'll tackle this challenge head-on with a practical approach to shadow correction using OpenCV. Our method leverages Multi-Scale Retinex (MSR) for illumination normalization, combined with adaptive
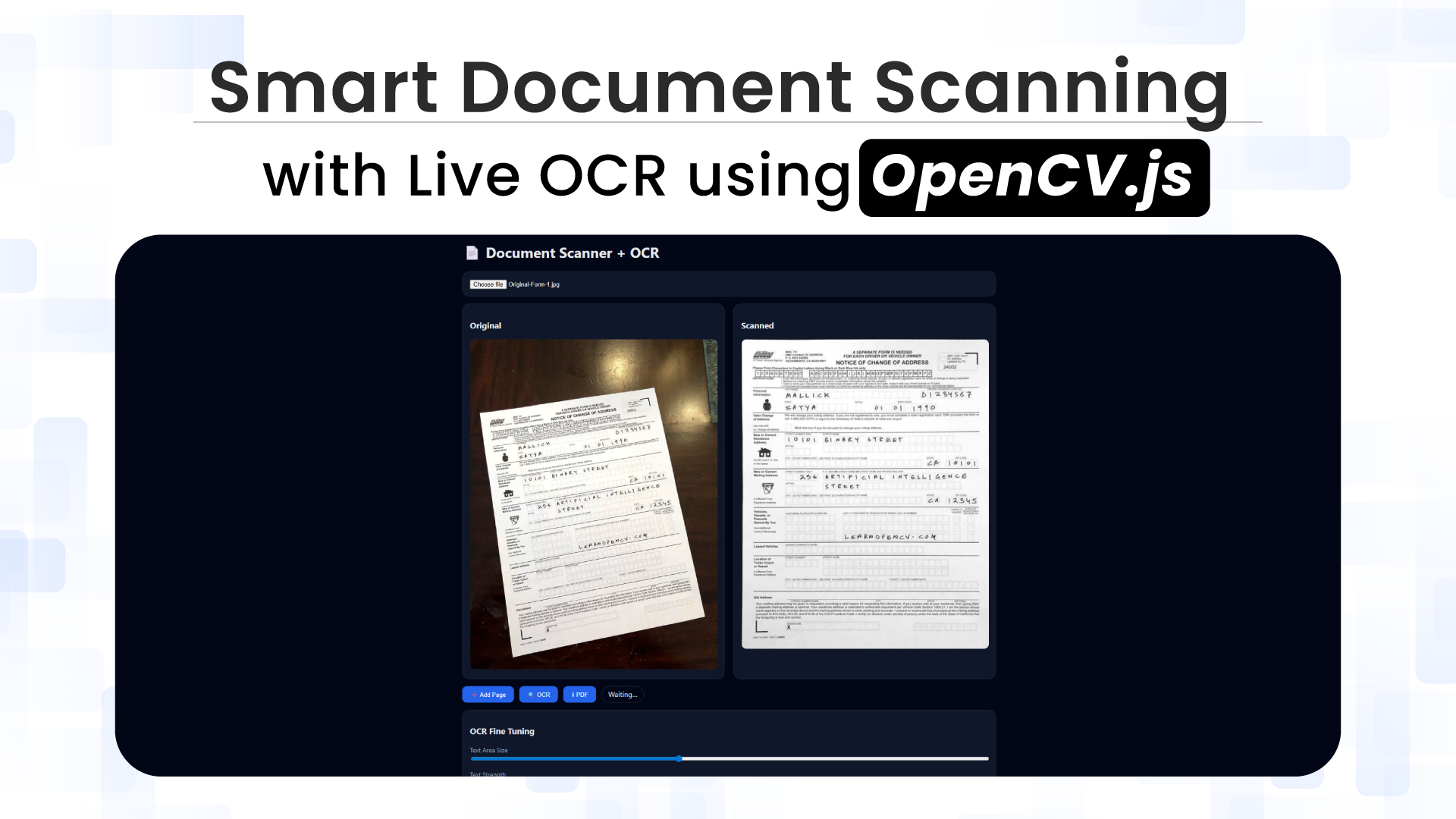
This blog explores how to build a smart, browser-based document scanner using OpenCV.js and live OCR. It covers document detection, perspective correction, interactive preprocessing, and client-side text extraction—all running entirely
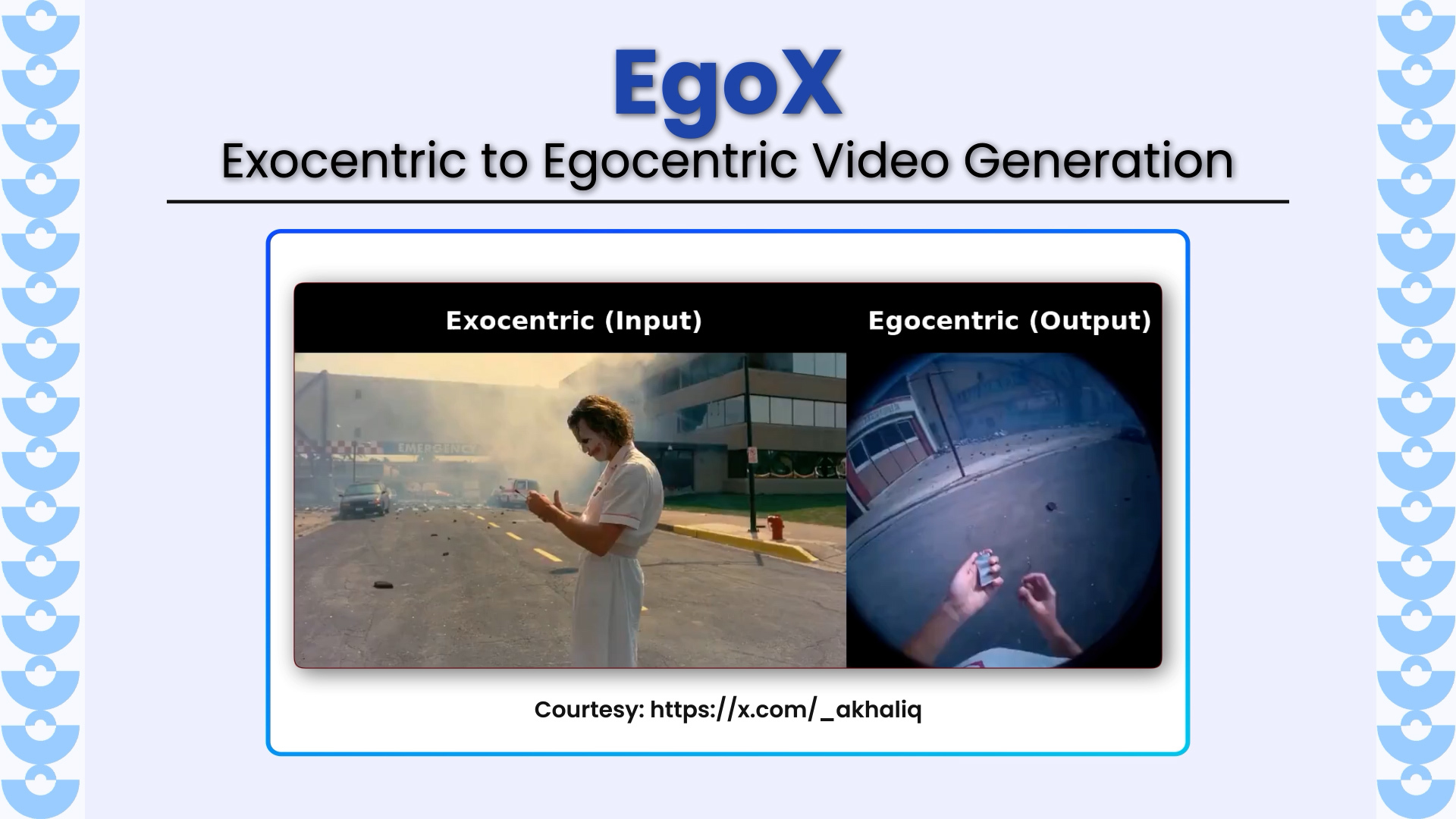
EgoX introduces a novel framework for translating third-person (exocentric) videos into realistic first-person (egocentric) videos using only a single input video. The work tackles a highly challenging problem of extreme
Underwater images often suffer from color loss, low contrast, and haze due to light absorption and scattering. This blog presents a multi-stage OpenCV pipeline in Python to enhance underwater images
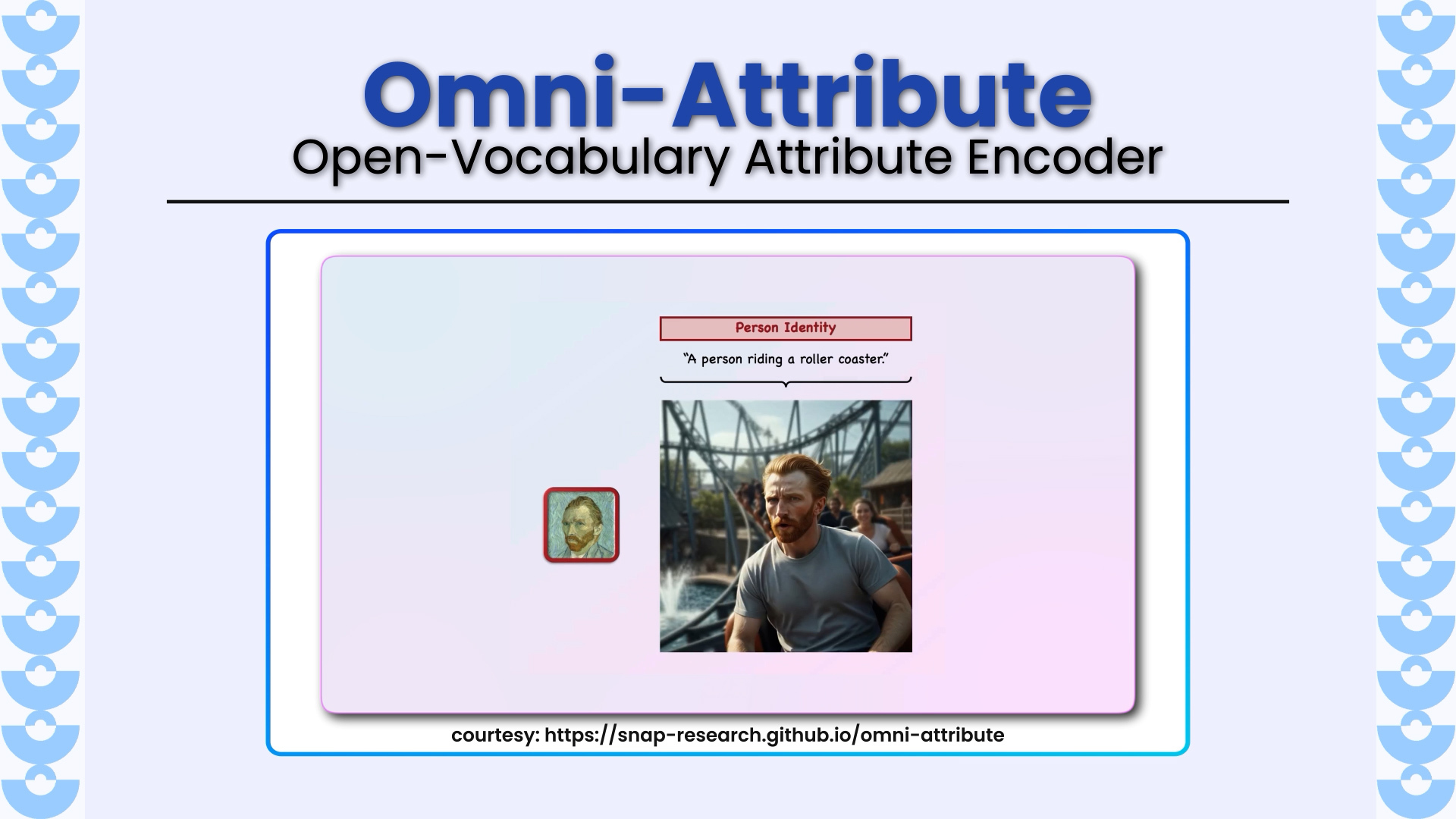
Omni-Attribute introduces a new paradigm for fine-grained visual concept personalization, solving a long-standing problem in image generation: how to transfer only the desired attribute (identity, hairstyle, lighting, style, etc.) without
We capture the world with cameras that compress depth, texture, and geometry into flat pixel grids, yet our minds effortlessly reconstruct the 3D structure behind them. What if computers could
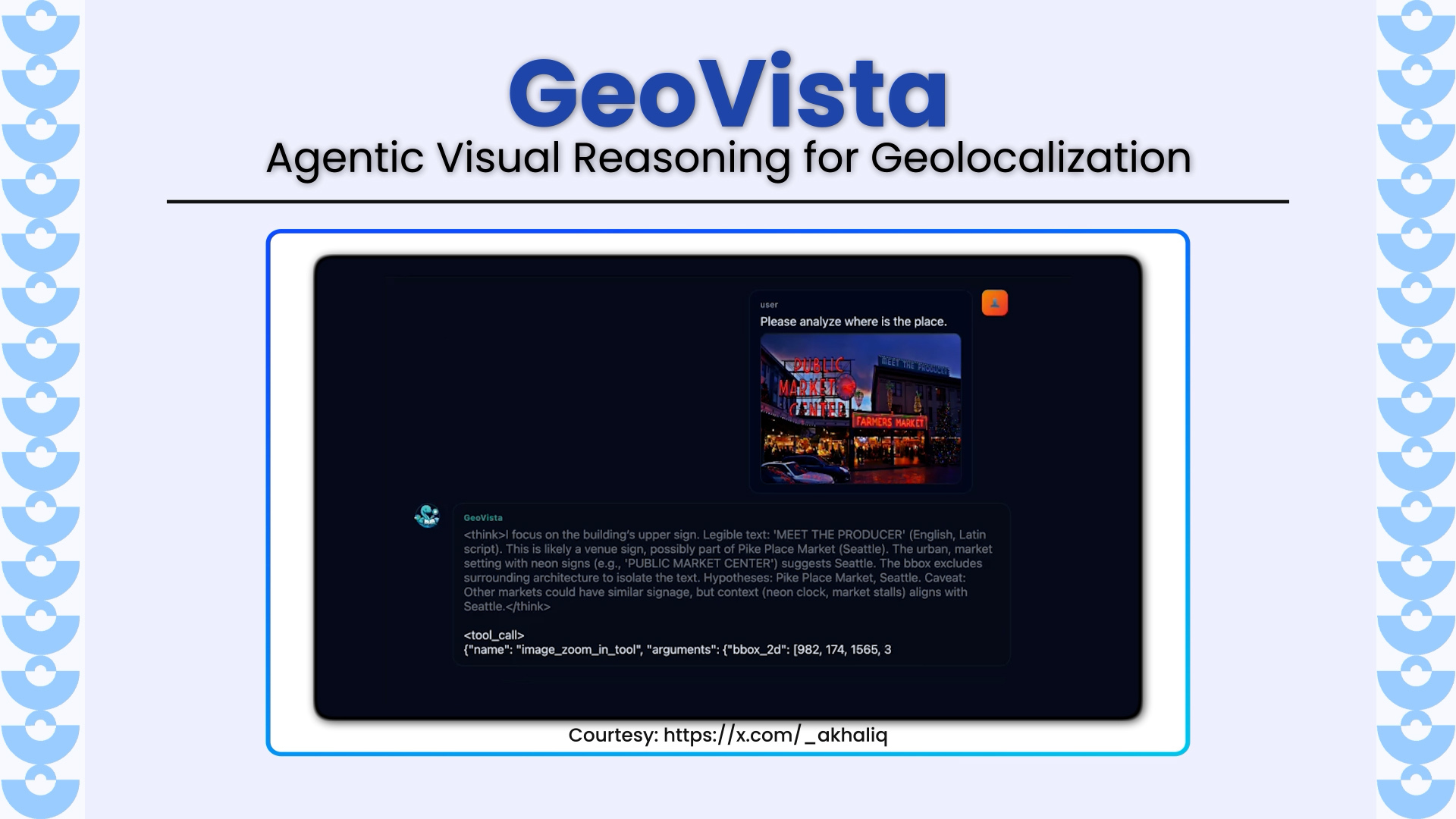
GeoVista introduces a new frontier in multimodal reasoning by enabling agentic geolocalization, a dynamic process where a model inspects high-resolution images, zooms into regions of interest, retrieves web information in
BlockVid represents a major leap forward in long-video generation, tackling one of the hardest open problems in video generation, i.e, producing coherent, high-fidelity, minute-long clips without collapse, drift, or degradation
This blog demonstrates how OpenCV HighGUI can be leveraged to build fully interactive GUIs. From handling mouse and keyboard events to creating trackbars, sliders, radio buttons, and checkboxes, learn how
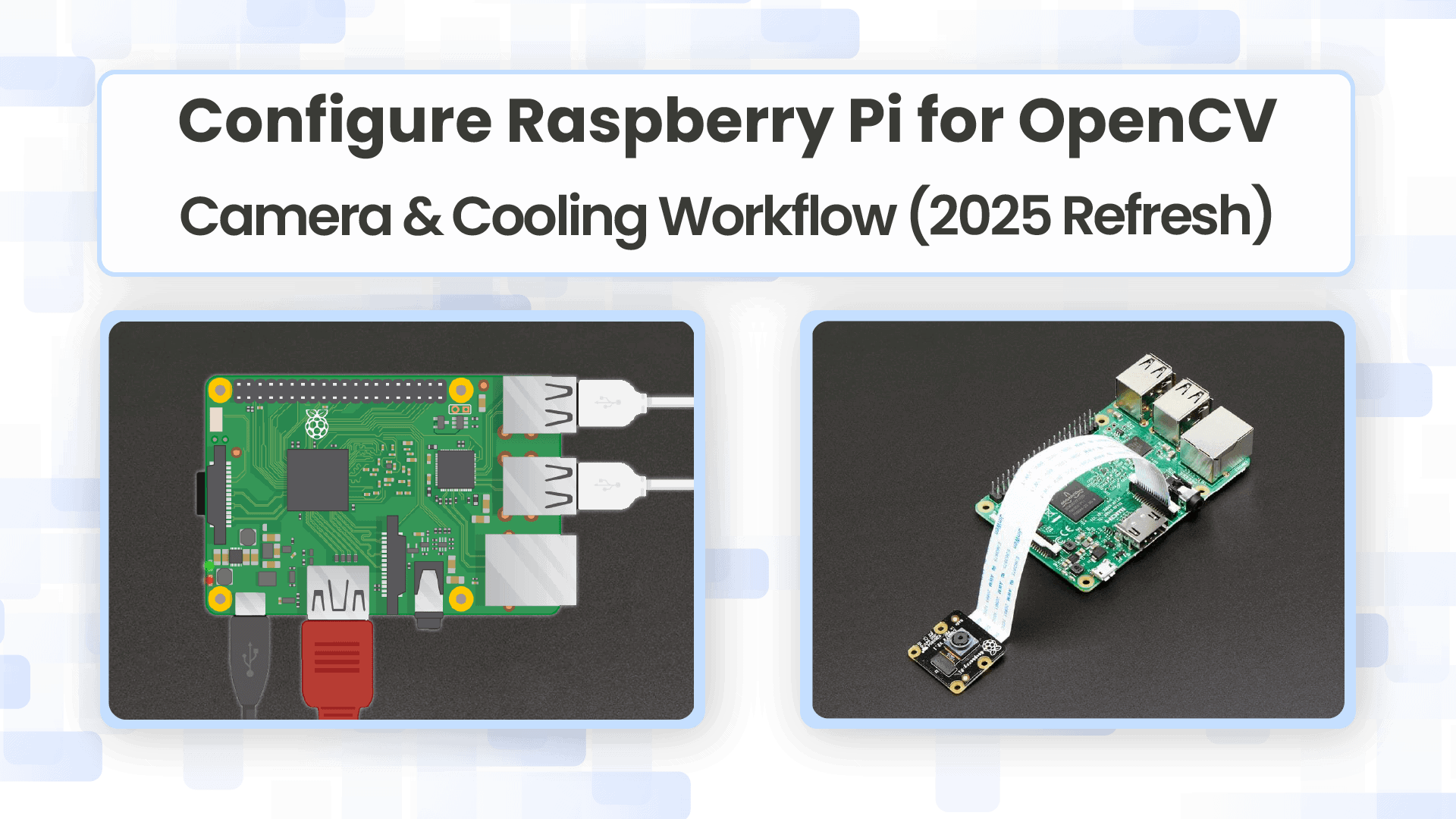
Computer vision has evolved into one of the most approachable fields for anyone interested in practical AI, whether you’re a student, engineer, hobbyist, or maker. With the performance of the